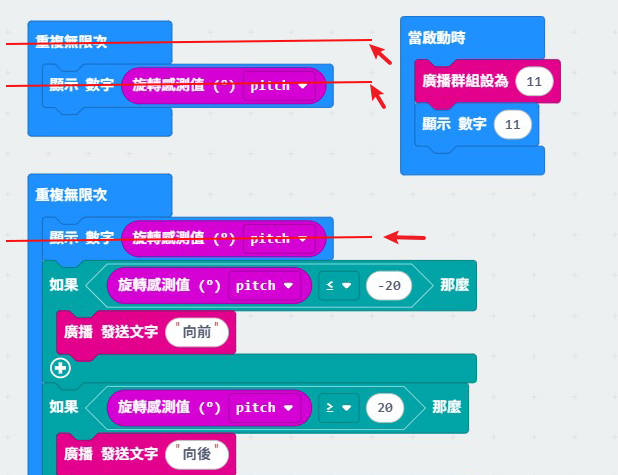
遙控小車﹕為防止太多指令導致遙控小車運作速度不順暢,實際運作前可以刪除顯示旋轉感測值的指令。
2025.6.27 修訂
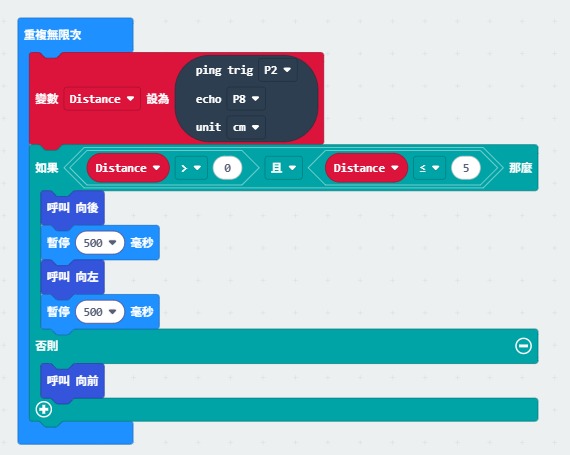
避障小車﹕由於處理超聲波傳感器的數據需要一定時間,為免超聲波傳感器資料於同一Loop內花費較多時間去處理多次數據,本次修訂新增名為distance的變數,用以先儲存超聲波傳感器所接收到的距離數據,再用此數據在後續與數字進行比較,令小車運作得更順暢。